樂高機器人之齒輪篇(DOC 30頁)
- 所屬分類:
- 智能製造
- 文件大小:
- 570 KB
- 下載地址:
- 相關資料:
- 機器人
樂高機器人之齒輪篇(DOC 30頁)內容簡介
2.1簡介
2.2齒數的計算
2.3加速和減速傳動
2.4齒輪傳動機構
2.5渦輪
2.6離合齒輪
2.7齒輪的配合
2.8.1滑輪和皮帶
2.8.2鏈條
2.8滑輪、皮帶、鏈條的使用
2.9差速器
8.1簡介
8.2.1直線運動
8.2簡單的差動裝置
8.3搭建雙差動裝置
8.5搭建轉向裝置
8.6搭建一個三輪裝置
8.7搭建同步驅動裝置
8.8其他結構
圖8.16無滑差動機構
圖8.9雙差動裝置剖麵圖
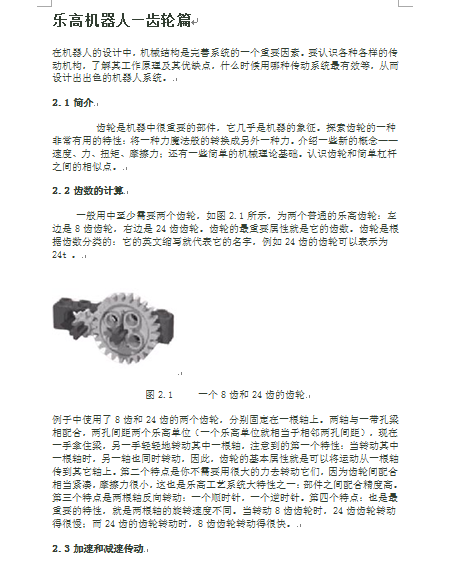
圖2.1一個8齒和24齒的齒輪
圖2.10對角線配合
圖2.11垂直配合的斜齒輪 圖2.1220齒斜齒輪
圖2.13垂直配合的冠齒輪 圖2.14雙麵斜齒輪
圖2.15垂直配合的雙麵斜齒輪
圖2.16滑輪
圖2.17皮帶與滑輪連接
圖2.18滑輪長距離傳遞運動
圖2.19鏈條
圖2.21:5傳動比
圖2.20相連的兩個輪子做直線運動
圖2.21轉彎時兩隻輪子行走的距離不同
圖2.22差速器的簡單的應用
圖2.39:1的傳動比
圖2.4渦輪裝置
圖2.5離合齒輪
圖2.6傳動鏈中的離合齒輪
圖2.7垂直齒輪配合
圖2.816齒齒輪
圖2.916齒齒輪與24齒齒輪的配合
圖8.11帶輪滑動掌舵裝置
圖8.12轉向裝置
圖8.13另一種轉向裝置
圖8.14阿克曼轉向機構:內部輪比外部輪轉彎急
圖8.15移動中軸線上的輪子
圖8.17三輪裝置
圖8.18樂高轉盤
圖8.19可行的輪胎同步驅動裝置
圖8.1簡單差動裝置
圖8.20錯誤的輪胎同步驅動裝置
圖8.21一個完整的同步驅動裝置(仰視圖)
圖8.22完全同步驅動器(俯視圖)
圖8.23全方位觸動傳感器
圖8.2使用單個角度傳感器觀察左右輪速度的差別
圖8.3可製動差動裝置
圖8.4帶16齒齒輪離合器,傳動操縱環,傳動轉變鉤
圖8.5小角輪結構
圖8.6避免打滑的角輪
..............................
2.2齒數的計算
2.3加速和減速傳動
2.4齒輪傳動機構
2.5渦輪
2.6離合齒輪
2.7齒輪的配合
2.8.1滑輪和皮帶
2.8.2鏈條
2.8滑輪、皮帶、鏈條的使用
2.9差速器
8.1簡介
8.2.1直線運動
8.2簡單的差動裝置
8.3搭建雙差動裝置
8.5搭建轉向裝置
8.6搭建一個三輪裝置
8.7搭建同步驅動裝置
8.8其他結構
圖8.16無滑差動機構
圖8.9雙差動裝置剖麵圖
圖2.1一個8齒和24齒的齒輪
圖2.10對角線配合
圖2.11垂直配合的斜齒輪 圖2.1220齒斜齒輪
圖2.13垂直配合的冠齒輪 圖2.14雙麵斜齒輪
圖2.15垂直配合的雙麵斜齒輪
圖2.16滑輪
圖2.17皮帶與滑輪連接
圖2.18滑輪長距離傳遞運動
圖2.19鏈條
圖2.21:5傳動比
圖2.20相連的兩個輪子做直線運動
圖2.21轉彎時兩隻輪子行走的距離不同
圖2.22差速器的簡單的應用
圖2.39:1的傳動比
圖2.4渦輪裝置
圖2.5離合齒輪
圖2.6傳動鏈中的離合齒輪
圖2.7垂直齒輪配合
圖2.816齒齒輪
圖2.916齒齒輪與24齒齒輪的配合
圖8.11帶輪滑動掌舵裝置
圖8.12轉向裝置
圖8.13另一種轉向裝置
圖8.14阿克曼轉向機構:內部輪比外部輪轉彎急
圖8.15移動中軸線上的輪子
圖8.17三輪裝置
圖8.18樂高轉盤
圖8.19可行的輪胎同步驅動裝置
圖8.1簡單差動裝置
圖8.20錯誤的輪胎同步驅動裝置
圖8.21一個完整的同步驅動裝置(仰視圖)
圖8.22完全同步驅動器(俯視圖)
圖8.23全方位觸動傳感器
圖8.2使用單個角度傳感器觀察左右輪速度的差別
圖8.3可製動差動裝置
圖8.4帶16齒齒輪離合器,傳動操縱環,傳動轉變鉤
圖8.5小角輪結構
圖8.6避免打滑的角輪
..............................

下一篇:尚無數據