機器人動力學培訓教材(PPT 39頁)
機器人動力學培訓教材(PPT 39頁)內容簡介
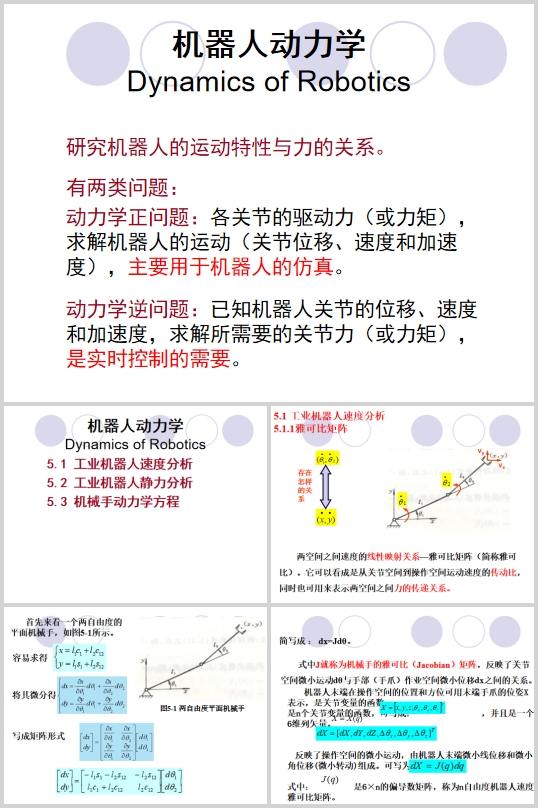
機器人動力學
DynamicsofRobotics
研究機器人的運動特性與力的關係。
有兩類問題:
動力學正問題:各關節的驅動力(或力矩),求解機器人的運動
(關節位移、速度和加速度),主要用於機器人的仿真。
動力學逆問題:已知機器人關節的位移、速度和加速度,
求解所需要的關節力(或力矩),是實時控製的需要。
5.1工業機器人速度分析
5.2工業機器人靜力分析
5.3機械手動力學方程
5.1工業機器人速度分析 5.1.1雅可比矩陣
其中:v―機器人手部在操作空間中的廣義速度,
J(q)―速度雅可比矩陣
―機器人關節在關節空間中的速度
從上式可以看出,對於給定的關節變量q,
雅可比矩陣是從關節空間的關節速度向操作空間的廣義速度映射的線性變換。
例5-1如圖所示二自由度機械手,手部沿固定坐標係Xo軸正向以
1.0m/s速度移動,杆長為。設在某瞬時求相應瞬時的關節速度。
矩陣A可逆
且A可逆時,
n階方陣A可逆的充分必要條件是A為非奇異矩陣,而且
奇異位形:由於雅可比矩陣J(q)是關節變量q的函數,總會存在一些位形,在這些位形處
,|J(q)|=0,即J(q)為奇異矩陣,這些位形就叫奇異位形。
一般,奇異位形有兩種類型
..............................
研究機器人的運動特性與力的關係。
有兩類問題:
動力學正問題:各關節的驅動力(或力矩),求解機器人的運動
(關節位移、速度和加速度),主要用於機器人的仿真。
動力學逆問題:已知機器人關節的位移、速度和加速度,
求解所需要的關節力(或力矩),是實時控製的需要。
5.1工業機器人速度分析
5.2工業機器人靜力分析
5.3機械手動力學方程
5.1工業機器人速度分析 5.1.1雅可比矩陣
其中:v―機器人手部在操作空間中的廣義速度,
J(q)―速度雅可比矩陣
―機器人關節在關節空間中的速度
從上式可以看出,對於給定的關節變量q,
雅可比矩陣是從關節空間的關節速度向操作空間的廣義速度映射的線性變換。
例5-1如圖所示二自由度機械手,手部沿固定坐標係Xo軸正向以
1.0m/s速度移動,杆長為。設在某瞬時求相應瞬時的關節速度。
矩陣A可逆
且A可逆時,
n階方陣A可逆的充分必要條件是A為非奇異矩陣,而且
奇異位形:由於雅可比矩陣J(q)是關節變量q的函數,總會存在一些位形,在這些位形處
,|J(q)|=0,即J(q)為奇異矩陣,這些位形就叫奇異位形。
一般,奇異位形有兩種類型
..............................

下一篇:尚無數據