典型機器人結構示例(PPT 67頁)
- 所屬分類:
- 智能製造
- 文件大小:
- 12434 KB
- 下載地址:
- 相關資料:
- 機器人
典型機器人結構示例(PPT 67頁)內容簡介
引言:
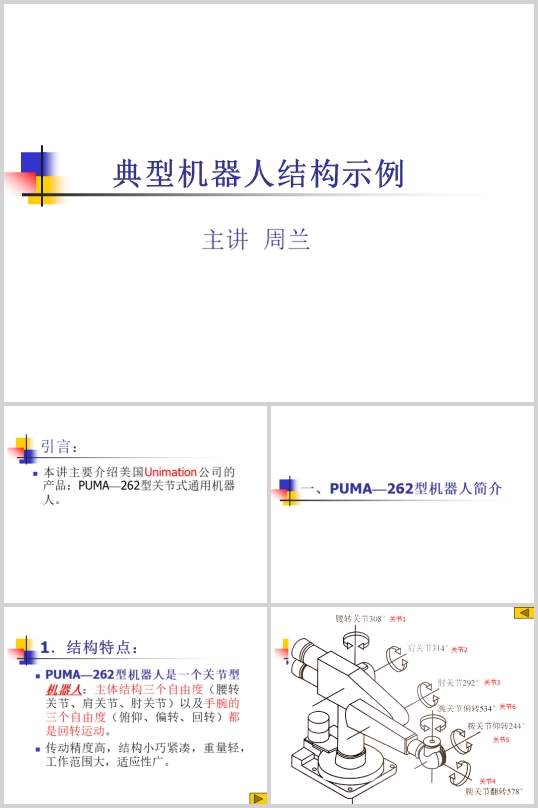
一、PUMA—262型機器人簡介
1.結構特點:
PUMA—262型機器人結構圖:
2.應用場合:
3.主要技術參數(1):
3.主要技術參數(2):
二、主要構成
1.立柱和基座(1):
1.立柱和基座(2):
立柱和基座圖例:
2.大臂:
大臂圖例:
3.小臂:
小臂圖例(1):
小臂圖例(2):
4.手腕:
手腕圖例:
三、主要運動
1.腰轉運動:
腰轉運動傳動原理圖:
腰轉運動結構圖:
2.肩關節運動(1):
2.肩關節運動(2):
肩關節運動傳動原理圖:
肩關節運動結構圖(1):
肩關節運動結構圖(2):
肩關節運動結構圖(3):
3.肘關節運動:
肘關節運動傳動原理圖:
肘關節運動結構圖(1):
肘關節運動結構圖(2):
肘關節運動結構圖(3):
肘關節運動結構圖(4):
4.手腕的俯仰運動:
手腕的俯仰運動傳動原理圖:
手腕的俯仰運動結構圖:
5.手腕的回轉運動:
手腕的回轉運動傳動原理圖:
手腕的回轉運動結構圖:
6.手腕的偏轉運動(1):
6.手腕的偏轉運動(2):
手腕的偏轉運動傳動原理圖:
手腕的偏轉運動結構圖:
四、PUMA—262機器人整體結構
1.大臂的結構圖(1):
1.大臂的結構圖(2):
2.小臂的結構圖(1):
2.小臂的結構圖(2):
3.回轉基座的結構圖(1):
五、典型零部件
1.彈性管聯軸器(1):
1.彈性管聯軸器(2):
彈性管聯軸器圖例:
2.電磁製動閘(1):
2.電磁製動閘(2):
電磁製動閘圖例:
PT-600弧焊機器人:
PT-600弧焊機器人外形圖(1):
PT-600弧焊機器人外形圖(2):
PT-600弧焊機器人腰部結構圖:
PT-600弧焊機器人大臂裝配圖:
PT-600弧焊機器人小臂結構圖:
PT-600弧焊機器人碗部結構圖:
PT-600機器人小臂和腕部的連接
..............................
一、PUMA—262型機器人簡介
1.結構特點:
PUMA—262型機器人結構圖:
2.應用場合:
3.主要技術參數(1):
3.主要技術參數(2):
二、主要構成
1.立柱和基座(1):
1.立柱和基座(2):
立柱和基座圖例:
2.大臂:
大臂圖例:
3.小臂:
小臂圖例(1):
小臂圖例(2):
4.手腕:
手腕圖例:
三、主要運動
1.腰轉運動:
腰轉運動傳動原理圖:
腰轉運動結構圖:
2.肩關節運動(1):
2.肩關節運動(2):
肩關節運動傳動原理圖:
肩關節運動結構圖(1):
肩關節運動結構圖(2):
肩關節運動結構圖(3):
3.肘關節運動:
肘關節運動傳動原理圖:
肘關節運動結構圖(1):
肘關節運動結構圖(2):
肘關節運動結構圖(3):
肘關節運動結構圖(4):
4.手腕的俯仰運動:
手腕的俯仰運動傳動原理圖:
手腕的俯仰運動結構圖:
5.手腕的回轉運動:
手腕的回轉運動傳動原理圖:
手腕的回轉運動結構圖:
6.手腕的偏轉運動(1):
6.手腕的偏轉運動(2):
手腕的偏轉運動傳動原理圖:
手腕的偏轉運動結構圖:
四、PUMA—262機器人整體結構
1.大臂的結構圖(1):
1.大臂的結構圖(2):
2.小臂的結構圖(1):
2.小臂的結構圖(2):
3.回轉基座的結構圖(1):
五、典型零部件
1.彈性管聯軸器(1):
1.彈性管聯軸器(2):
彈性管聯軸器圖例:
2.電磁製動閘(1):
2.電磁製動閘(2):
電磁製動閘圖例:
PT-600弧焊機器人:
PT-600弧焊機器人外形圖(1):
PT-600弧焊機器人外形圖(2):
PT-600弧焊機器人腰部結構圖:
PT-600弧焊機器人大臂裝配圖:
PT-600弧焊機器人小臂結構圖:
PT-600弧焊機器人碗部結構圖:
PT-600機器人小臂和腕部的連接
..............................

下一篇:尚無數據