工業機器人的分類按機械結構分類介紹(PPT 22頁)
工業機器人的分類按機械結構分類介紹(PPT 22頁)內容簡介
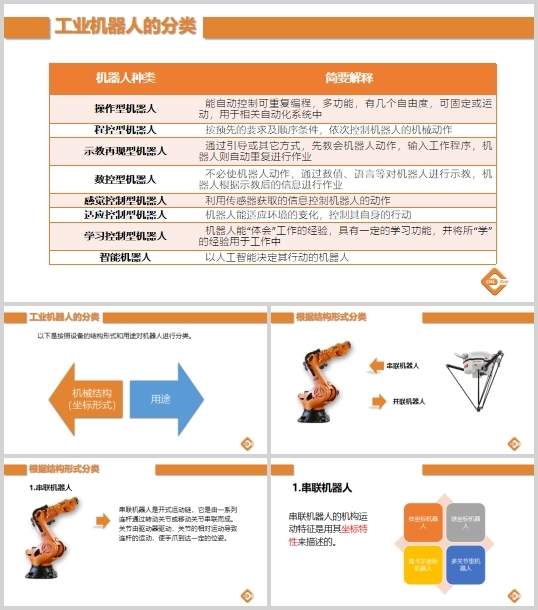
串聯機器人是開式運動鏈,它是由一係列連杆通過轉動關節或移動關節串聯而成。
關節由驅動器驅動,關節的相對運動導致連杆的運動,使手爪到達一定的位姿。
串聯機器人的機構運動特征是用其坐標特性來描述的。
1.串聯機器人——⑴柱坐標機器人
當水平臂或杆架安裝在一垂直柱上,
而該柱又安裝在一個旋轉基座上,這種結構可稱為柱坐標機器人。
其運動特點如下:
手臂可伸縮(沿r方向)
滑動架(或托板)可沿柱上下移動(z軸方向)
水平臂和滑動架組合件可作為基座上的一個整體而旋轉(繞z軸)
球坐標機器人的空間位置分別由旋轉、擺動和平移3個自由度確定。
由於機械和驅動連線的限製,機器人的工作包絡範圍是球體的一部分。
其工作特點如下:
手臂可伸出縮回範圍R,類似於可伸縮的望遠鏡套筒
在垂直麵內繞β軸旋轉
在基座水平內轉動角度為
..............................
關節由驅動器驅動,關節的相對運動導致連杆的運動,使手爪到達一定的位姿。
串聯機器人的機構運動特征是用其坐標特性來描述的。
1.串聯機器人——⑴柱坐標機器人
當水平臂或杆架安裝在一垂直柱上,
而該柱又安裝在一個旋轉基座上,這種結構可稱為柱坐標機器人。
其運動特點如下:
手臂可伸縮(沿r方向)
滑動架(或托板)可沿柱上下移動(z軸方向)
水平臂和滑動架組合件可作為基座上的一個整體而旋轉(繞z軸)
球坐標機器人的空間位置分別由旋轉、擺動和平移3個自由度確定。
由於機械和驅動連線的限製,機器人的工作包絡範圍是球體的一部分。
其工作特點如下:
手臂可伸出縮回範圍R,類似於可伸縮的望遠鏡套筒
在垂直麵內繞β軸旋轉
在基座水平內轉動角度為
..............................

下一篇:尚無數據