機器人機械結構介紹(PPT 95頁)
機器人機械結構介紹(PPT 95頁)內容簡介
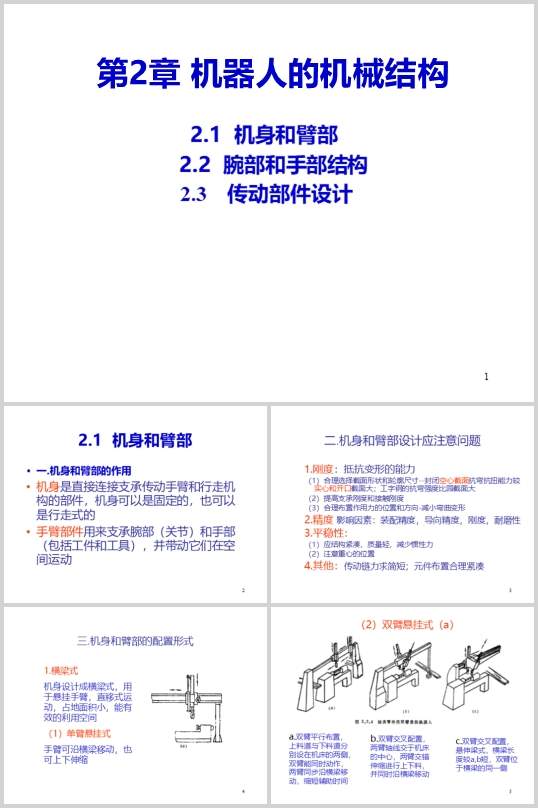
2.1機身和臂部
二.機身和臂部設計應注意問題
三.機身和臂部的配置形式
(2)雙臂懸掛式(a)
(2).雙臂懸掛式(b)
2.立柱式
(2)雙臂配置
3.機座式(1)
機座式(2)
4.屈伸式
四.機身的結構形式
2.升降台式
2.俯仰式
4.類人機器人機身
五.機械臂的典型結構
電機驅動絲杆螺母直線運動結構圖例
2.手臂的回轉運動機構
雙臂機器人手臂結構圖例:
齒輪傳動機構(1)
齒輪傳動機構(2)
3.關節型機械臂的結構(1)
五軸關節型機器人手臂運動圖例(1):
五軸關節型機器人手臂運動圖例(2):
3.關節型機械臂的結構(2)
2.2腕部和手部結構
手腕自由度圖例:
二.手腕的設計要求
三.手腕的分類
單自由度手腕圖例:
1.按自由度的數目分(2):
二自由度手腕圖例:
1.按自由度的數目分(3):
三自由度手腕圖例:
2.按手腕的驅動方式分:
1)液壓直接驅動BBR手腕圖例:
3)雙回轉油缸驅動手腕
4)輪係驅動的二自由度BR手腕:
輪係驅動二自由度手腕圖例(1)
輪係驅動二自由度手腕圖例(2):
輪係驅動二自由度手腕圖例(3):
附加運動動作分解:
5)輪係驅動的RBR手腕:
輪係驅動三自由度手腕圖例(1):
輪係驅動三自由度手腕圖例(2):
輪係驅動三自由度手腕圖例(3):
輪係驅動三自由度手腕圖例(4):
輪係驅動三自由度手腕圖例(5):
2.3手部結構
二、手部的設計要求
三.手部的分類
夾持方式圖例
2.按手爪的運動形式分:
回轉型圖例:
平動型圖例:
平移型圖例:
3.按夾持原理分:
四.典型結構
氣動手爪圖例:
斜楔杠杆式手部:
機械手爪圖例:
2.電磁吸盤(1):
3.真空式吸盤:
真空吸盤結構圖例:
4.自適應吸盤:
5.異形吸盤:
6.噴氣式吸盤
7.擠氣式吸盤:
五.手指的形狀
2.3傳動部件設計
二.鋼帶傳動
三.諧波傳動
諧波傳動特點
工作原理
1.剛輪固定—柔輪輸出:
2.柔輪固定—剛輪輸出:
3.波發生器固定—剛輪輸出:
波發生器種類
傳動件傳動間隙的消除
機器人製造材料——以結構件材料為例
..............................
二.機身和臂部設計應注意問題
三.機身和臂部的配置形式
(2)雙臂懸掛式(a)
(2).雙臂懸掛式(b)
2.立柱式
(2)雙臂配置
3.機座式(1)
機座式(2)
4.屈伸式
四.機身的結構形式
2.升降台式
2.俯仰式
4.類人機器人機身
五.機械臂的典型結構
電機驅動絲杆螺母直線運動結構圖例
2.手臂的回轉運動機構
雙臂機器人手臂結構圖例:
齒輪傳動機構(1)
齒輪傳動機構(2)
3.關節型機械臂的結構(1)
五軸關節型機器人手臂運動圖例(1):
五軸關節型機器人手臂運動圖例(2):
3.關節型機械臂的結構(2)
2.2腕部和手部結構
手腕自由度圖例:
二.手腕的設計要求
三.手腕的分類
單自由度手腕圖例:
1.按自由度的數目分(2):
二自由度手腕圖例:
1.按自由度的數目分(3):
三自由度手腕圖例:
2.按手腕的驅動方式分:
1)液壓直接驅動BBR手腕圖例:
3)雙回轉油缸驅動手腕
4)輪係驅動的二自由度BR手腕:
輪係驅動二自由度手腕圖例(1)
輪係驅動二自由度手腕圖例(2):
輪係驅動二自由度手腕圖例(3):
附加運動動作分解:
5)輪係驅動的RBR手腕:
輪係驅動三自由度手腕圖例(1):
輪係驅動三自由度手腕圖例(2):
輪係驅動三自由度手腕圖例(3):
輪係驅動三自由度手腕圖例(4):
輪係驅動三自由度手腕圖例(5):
2.3手部結構
二、手部的設計要求
三.手部的分類
夾持方式圖例
2.按手爪的運動形式分:
回轉型圖例:
平動型圖例:
平移型圖例:
3.按夾持原理分:
四.典型結構
氣動手爪圖例:
斜楔杠杆式手部:
機械手爪圖例:
2.電磁吸盤(1):
3.真空式吸盤:
真空吸盤結構圖例:
4.自適應吸盤:
5.異形吸盤:
6.噴氣式吸盤
7.擠氣式吸盤:
五.手指的形狀
2.3傳動部件設計
二.鋼帶傳動
三.諧波傳動
諧波傳動特點
工作原理
1.剛輪固定—柔輪輸出:
2.柔輪固定—剛輪輸出:
3.波發生器固定—剛輪輸出:
波發生器種類
傳動件傳動間隙的消除
機器人製造材料——以結構件材料為例
..............................

下一篇:尚無數據